자동차에 눈을 달다: 자율주행자동차는 어떻게 주변을 인식할까요?

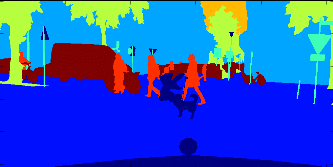
위의 사진을 아무런 배경 지식 없이 본다면, 사진 속 물체들은 단지 현란한 색상의 박스, 블록, 숫자들로 보일 것입니다. 그러나 내용을 알고 본다면 이들은 어안 카메라(fisheye cameras), 라이더, 그 외 다양한 센서들을 통해서 처리될 수 있는 데이터로 인식될 겁니다. 이러한 정보들은 자율주행자동차가 복잡한 주변 환경 속에서 안전하게 주행함에 있어 매우 중요한 역할을 담당하는 데이터이죠.
올해 CES는 자율주행자동차, 즉 무인자동차 관련 기술들이 점령했다고도 말할 수 있는데요, 그만큼 올해 라스베가스에서는 자동차 분야의 첨단 기술들을 만나볼 수 있는 많은 데모들이 시연될 예정입니다. CES에서 참석한 다양한 자동차 제조사 및 연구원들을 통해 새로운 자율주행 시스템을 기반으로 어떻게 무인주행차가 도로를 인식하는지 선보이게 되겠죠.
엔비디아는 자율주행자동차의 인공지능 시스템을 위한 가장 강력한 엔진인 드라이브 PX 2를 사용해 이 연구를 이끌어나갔습니다. 엔비디아의 드라이브 PX 2와 이를 지원하는 소프트웨어인 드라이브웍스는 자동차 개발자들이 새로운 자율주행자동차에 딥 러닝 기능을 추가할 수 있는 시스템을 제공합니다.
초당 24조의 딥 러닝 작업을 수행하는 등 매우 놀라운 성능을 선보이는 이 시스템의 기능에는 어떤 것이 있는지 보다 자세히 설명드려야 할 필요가 있겠죠? 그래서, 자율주행자동차 데모를 통해 당신이 어떤 것을 볼 수 있고, 혹은 볼 수 없는지에 대한 간단한 가이드를 준비했습니다.
눈으로 확인할 수 있는 것
두 가지 인식 기능:
- 시맨틱 분할(Semantic segmentation) -이는 사물의 특정 종류에 속한 컴퓨터 이미지를 구성하는 점들인 픽셀을 구별할 수 있는 기능입니다. 도로는 파랑색이고, 사람들은 주황색이며, 자동차는 붉은색입니다. 만약 컴퓨터가 이 정도로 세밀하게 이미지를 파악할 수 있다면 자율 주행 시스템을 통해 더 안전한 주행 환경을 누릴 수 있을 겁니다.
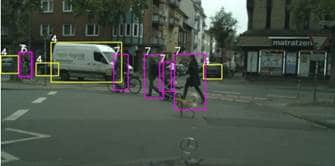
- 사물 감지(Object detection)- 해당 기능은 사물의 위치를 박스로 표시합니다. 당신은 동시에 많은 사물들을 인식하는 기능을 비디오를 통해 확인할 수 있습니다. 아래 예시와 같이 사람과 자동차를 구별하는 탐지기를 통해 박스로 사물을 표시하는 것이 색으로 분할하는 것보다 위치를 표현하는데 있어 더 간편한 방법입니다.
눈에 보이지 않는 것들
도로에서 자율주행 시스템이 어떻게 작동하는지에 대한 데모를 보면서 가장 먼저 보이는 것이 시맨틱 분할과 사물 감지일 것 일텐데요.
다음에 소개해드릴 것이 바로 눈에 보이지 않는 것들에 관한 것입니다. 즉, 도로 위에는 너무도 많은 사물들이 있고 이 모든 것들을 모두 예측하고 판단하기는 쉽지 않은데요, 이때 사용되는 딥 러닝 기술은 사람이 할 수 없는 일을 가능하게 합니다. 사물들이 너무나 많기 때문에 도로 위 모든 종류의 사물을 인식할 수 있는 소프트웨어를 제작하는 것은 무척 어려운 일인데, 해결책은 바로 머신이 자기 스스로를 가르치도록 하는 것이었습니다. 딥 러닝을 통해 복잡한 목표를 구체화할 수있게 되었고 만약 옳은 방식, 정확한 절차, 알고리즘으로 구현된다면 네트워크는 복잡한 작업들을 해결할 수 있는 방법을찾게 될 것입니다.
엔비디아 GPU의 엄청난 연산 능력을 사용해 이러한 네트워크들을 훈련시켰습니다. 다양한 작업을 동시에, 또는 병렬적으로 수행할 수 있는 GPU는 이러한 딥 러닝 기능에 적합했지요. 또한 GoogLeNet이나 VGG와 같은 최신 고급 딥 러닝 네트워크를 통해 원샷 감지나 분할 설계를 구현했습니다. 여기서 ‘원샷’은 네트워크가 전체 이미지를 수용하고 감지 결과를 전달하거나, 분할을 위한 픽셀 구별을 한다는 뜻이죠.
자동차 제조사들은 다양한 상황에서 사물을 인식하기 위한 실제 주행에서의 영상을 통해 시스템을 빠르게 훈련시킬 수 있었습니다.더 많은 정보가 딥 러닝 시스템에 주어질 수록 시스템은 똑똑해졌죠. 그리고 이렇게 똑똑해진 시스템을 KITTI 벤치마크 스위트와 같은 연구원들의 독립 집단이 수행한 실제 이미지 인식 벤치마크의 결과와 비교하여 다른 시스템에 비해 어느 정도 앞서 있는지 확인할 수 있게 했습니다.
만약 여러분이 데모를 보게 된다면 아래 3 가지 질문을 던져보세요. 시스템이 어떻게 그들이 이전엔 보지 못했던 상황을인식하도록 훈련받았는지, 실시간으로 작동하고 있는지, 이러한 결과들과 컴퓨터 공학자들이 컴퓨터 비전 시스템의 정확도를 측정한 벤치마크와 비교했을 때 어떠한지 말입니다.
드라이브 PX 2로 자율주행 시대에 한 걸음 더 다가간 엔비디아의 성장을 기대해주세요!