딥 러닝: 사람처럼 걷는 로봇의 두뇌를 완성하다
UC 버클리의 이고르 모르다치(Igor Mordatch) 박사는 로보틱스과 피터 아빌(Pieter Abbeel) 교수의 연구실에서 근무하며 자율 로봇을 제작하고 있습니다. 바로 로봇 ‘다윈(Darwin)’ 프로젝트입니다.
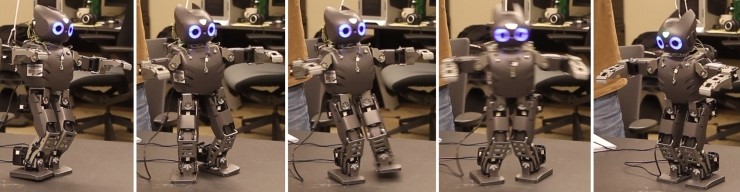
로봇 ‘다윈’은 걷는 것이 대다수의 로봇과는 조금 다릅니다. 물론 로봇 특유의 경직된 걸음걸이로 뒤뚱거리기도 하고, 때때로 넘어지기도 하죠. 하지만 다윈의 특별한 점은 바로 실수로부터 학습하고, 그 내용을 토대로 즉석에서 걷는 방법을 조정한다는 겁니다. 마치 걸음마를 배우는 어린 아이 같이 말이에요. 정말 특별하지 않나요?^^
다윈이 걸음마를 배우는 과정은 다시 프로그래밍 할 필요 없이 환경 변화와 새로운 상황에 자율적으로 적응하는, 새로운 세대의 로봇을 향한 첫 걸음을 의미하는지도 모릅니다. 다윈을 시작으로 자율 로봇의 완성도가 점점 높아진다면, 이러한 로봇을 이용해 구조 활동이나 재해 지역 복구와 같은 위험한 작업도 해결할 수 있겠지요. 나아가 우리의 일상에서도 집안일을 돕거나 물건을 배달하는 집사와 같은 역할을 할 수 있지 않을까요?
연구 프로젝트의 핵심 멤버인 모르다치 박사는 “자율 로봇이 스스로 학습하며 지속적으로 발전해나가다 보면, 이보다 훨씬 복잡하고 어려운 수준의 목표 달성도 가능해질 것입니다”라며 그 기술의 강력한 잠재력을 몇 번이고 강조했답니다.
그렇다면 이처럼 스스로 발전하는 다윈의 놀라운 능력은 어떻게 구현되는 걸까요?
바로 GPU를 통해 가속화되는 두 개의 딥 러닝 네트워크를 통해 구현된 지능과 학습 능력 덕분입니다. 딥 러닝의 ‘학습’ 능력은 인간의 두뇌를 모델로 시뮬레이트 된 신경 네트워크와 알고리즘 구조를 통해 이뤄집니다. 이 신경 네트워크는 피드백에 따라 뉴런 사이의 연결을 강화하거나, 또는 약화함으로써 로봇이 인간을 닮아가는 지식을 습득하는 과정에서 필수적인 요소가 되었죠.
다윈이 학습하는 과정에는 두 가지 단계를 거치는데요, 바로 시뮬레이션과 실행입니다.
두 단계를 더 자세히 보여주기 위해 우선 모르다치 씨는 다윈의 물리적 실체(높이, 둘레 등)에 대한 시뮬레이션 모델을 만드는 기초 작업을 진행했습니다. 그 후 부드러운 카펫 바닥, 거친 흙과 모래로 뒤덮인 산길 등과 같은 여러 환경의 기본적인 속성을 설정했죠. 여기서 놀라운 것은, 모르다치 씨가 로봇에게 가르쳐 주지 않은 건 딱 하나, 걷는 방법이었다란 겁니다.
우선 첫 번째 단계인 시뮬레이션에서 다윈은 그가 알고 있는 것을 최대 활용하려고 했습니다. 그의 다리를 어떻게 위치시켜야 하는지, 또는 엎드린 자세에서 일어나기 위해 자신의 몸통을 어떻게 비틀어야 하는지 등 다양한 동작을 위한 올바른 행동 순서를 스스로 파악했습니다.
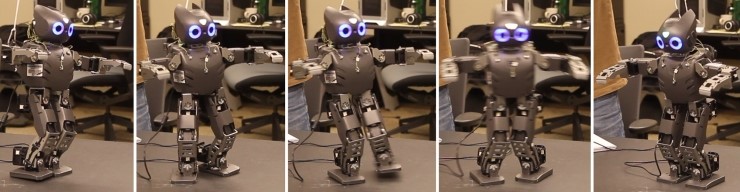
두 번째 단계인 실천으로 넘어간 다윈은 시뮬레이션을 통해 학습한 내용을 현실에 적용했습니다. 하지만 말처럼 쉽지만은 않은 일이었는데요, 가령 고르지 않은 지형에서 균형을 유지할 수 있는 적절한 방법을 판단하거나, 혹은 발목이 너무 많이 비틀어져 넘어졌을 경우, 누구의 도움 없이 스스로 일어나야 하기도 했으니까요.
모르다치 씨는 “정확성을 높이기 위해 시뮬레이션 상에서 수많은 시도를 했으나, 역시 현실과는 많이 다르다는 것을 느꼈습니다”며 “그렇기 때문에 더욱 실시간 학습 기능은 자율 로봇에게 필수적이라 판단했죠”라고 말했습니다.
더불어 그는 딥 러닝의 복잡한 학습 과정에서 빠질 수 없는 필수 조건은 GPU의 탑재였다고 강조했습니다. 만약 CPU를 기반으로 자율 로봇을 트레이닝 했다면, 이 간단한 데모가 최소한 일주일 이상 걸렸을 텐데, 병렬 컴퓨팅으로 빠른 연산 처리가 가능한 GPU로 작업했기 때문에 단 세 시간 만에 끝낼 수 있었다고 하는데요. 참고로 모르다치 씨는 현재 아마존(Amazon) 클라우드를 통해 호스팅 되는 GPU를 사용하고 있다고 합니다.
모르다치 씨는 다윈에 대한 연구를 이어가는 동시에, 사람 인체의 시뮬레이션 모델에 딥 러닝을 적용하는 연구를 진행하고 있습니다. 또한 스탠포드 대학교의 연구자들과 협력하여 인간의 두뇌가 운동을 제어하고 학습하는 방법을 이해하려고 노력하고 있기도 하죠.
모르다치 씨는 언젠가 이러한 지식들이 충분히 모였을 때, 의사들이 특정 수술이 환자의 움직임에 미치는 영향을 예측하는데 많은 도움이 될 것이라 확신하며 오늘도 다양한 딥 러닝 연구에 매진하고 있답니다.
이렇듯 딥 러닝을 이용한 더욱 복잡하고 도전적인 작업일수록, 더 뛰어난 성능의 GPU를 필수로 하죠. 그렇기에 엔비디아는 모르다치 씨처럼 미래 기술을 구현하기 위해 노력하는 이들에게 더 나은 연구 환경을 조성하는데 협력하고 있습니다. 자율 로봇의 연구가 의학계의 혁신을 가져올 수 있듯, 각 분야의 혁신을 위한 토대를 제공하는 엔비디아, 또 어떤 놀라운 소식을 가지고 여러분께 돌아올지 함께 기대해 주세요!