엔비디아가 안전하고 편안한 주행 경험을 구현하도록 설계된 제어 레이어를 적용하여 엔비디아 드라이브 AV(NVIDIA DRIVE™ AV) 자율주행 자동차 소프트웨어 제품군을 한층 강화했습니다. 이 소프트웨어의 주요 구성 요소는 차량과 탑승자, 도로 이용자를 보호하는 강력한 주행 정책인 세이프티 포스 필드(Safety Force Field™, 이하 SFF)입니다.
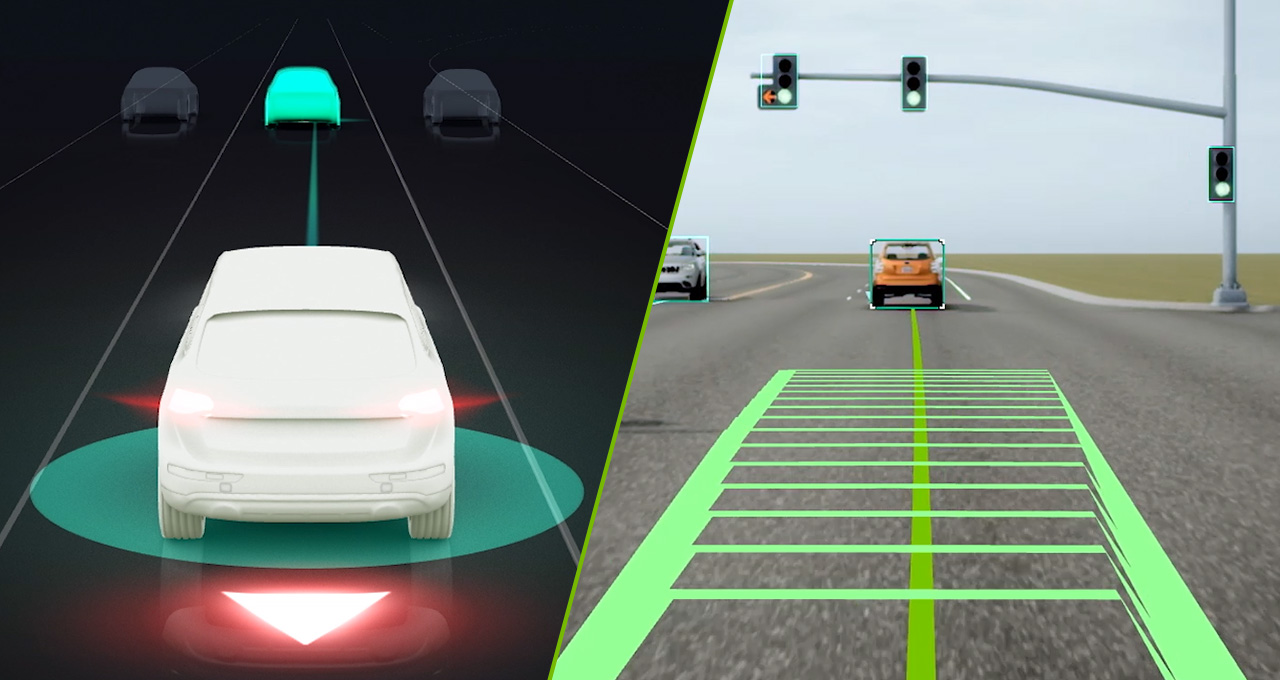
SFF는 센서 데이터를 수집하고, 차량과 도로 이용자를 보호하기 위한 일련의 조치를 결정함으로써 주변환경의 움직임을 분석하고 예측합니다. SFF 프레임워크는 운행 중 안전하지 않은 상황이 발생하거나 유도되지 않도록 하며, 잠재적인 위험을 완화하기 위해 필요한 조치를 취합니다.
강력한 계산 기능을 갖춘 SFF는 제한된 통계로 복잡한 실제상황 시나리오를 모델링하려는 시도 대신, 차량이 수학적인 제로-충돌(zero-collisions)검증에 기반해 안전을 유지하도록 합니다. 엔비디아드라이브플랫폼에서 실행되는 프레임별 물리 기반의 SFF 연산은 차량 센서 데이터에서 수행됩니다.
SFF는 현실 세계에서 재현하기에는 다소 위험할 수 있는 고속도로와 도심주행 관련 시나리오를 포함한 실제 데이터와 비트(bit) 정밀 시뮬레이션을 통한 검증을 거쳤답니다.
위험 상황 완화와 완전한 충돌 방지
미국 고속도로교통안전국(NHTSA)은 충돌 사고의 약 94%가 인간의 실수로 일어난다고 추산하고 있습니다. 반면, 업계는 자율주행 자동차 개발로 사고 제로화에 힘쓰고 있습니다. 경로 계획, 예측, SFF 등과 같은 안전 기능을 갖춘 드라이브 AV 플랫폼 강화는 이러한 목표를 달성하기 위한 대도약이라고 볼 수 있죠.
SFF만의 특징으로는 제동과 자동차 조정 제약 조건 모두를 고려하는 기능이 있습니다. 이와 같은 이중 기능은 별도로 작동했을 경우 발생할 수 있는 차량 이상 행동을 방지하는데 도움이 됩니다. 이 정책은 대규모 규칙과 예측이 아닌, 충돌 방지라는 한 가지 핵심 원칙만 따르죠.
엔비디아 자율주행 소프트웨어 사업부 부사장 데이비드 니스터(David Nister)는 “주행에서 인간의 실수라는 요소를 제외시켜 대다수 충돌을 방지하고 이로 인한 여파를 최소화할 수 있습니다”라며, “수학적으로 설계된 SFF를 적용한 자율주행 자동차는 서로를 밀어내는 자석처럼 스스로를 위험 상황으로부터 보호하며 위험한 상황을 유발하지 않습니다”라고 말했습니다.
투명한 개방형 플랫폼
SFF는 개방형 플랫폼으로, 다른 주행 소프트웨어와 결합할 수 있습니다. 모션 계획 스택에서 안전한 의사결정 정책 역할을 하는 SFF는 안전하지 않은 행동을 모니터링하고 예방합니다. 또한 복잡하고 긴 도로 규칙에서 장애물 회피를 명확하게 구분해 내기도 하죠. 엔비디아 드라이브와 같은 고성능 컴퓨팅 플랫폼에서 실행되는 경우에는, 또 다른 계층의 다양성과 중복성 기능을 추가함으로써 최고 수준의 안전성을 제공합니다.
세이프티 필드(Safety Field)에 대한 보다 자세한 정보는 www.nvidia.com/sff에서 확인할 수 있습니다.