
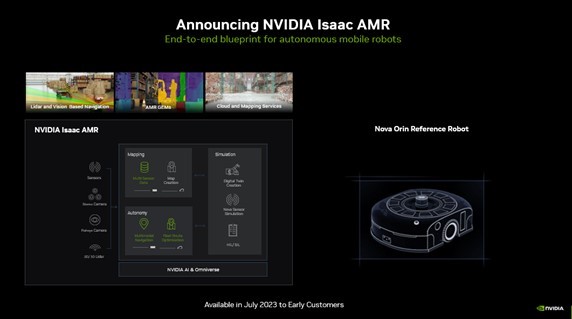
차세대 자율주행로봇(autonomous mobile robot, 이하 AMR) 플릿을 지원하는 새로운 플랫폼인 아이작(Isaac) AMR이 발표되었습니다! 아울러 아이작 AMR은 모바일 로봇에 고급 매핑, 자율성, 시뮬레이션을 제공하며 가까운 시일 내 초기 고객에게 제공될 예정입니다.
아이작 AMR은 자율주행로봇 플릿을 시뮬레이션, 검증, 배포, 최적화, 관리할 수 있는 플랫폼입니다. 엣지 투 클라우드 소프트웨어 서비스, 컴퓨팅, 레퍼런스 센서 세트는 물론 AMR의 개발, 배포를 가속화하는 로봇 하드웨어가 포함돼 비용과 시장 출시 기간을 단축시켜 줍니다.
업계의 운영 효율성 수요 증가를 충족하기 위한 모바일 로봇 출하량 급증이 출시의 배경이 되었습니다. ABI 리서치(ABI Research)에 따르면, 모바일 로봇 출하량은 2023년 25만1000대에서 2028년 160만대로 증가할 것으로 예상되며, 같은 기간 매출은 126억 달러에서 645억 달러로 급증할 것으로 전망되고 있습니다.
자율성을 향한 여정 단축
로봇 도입의 폭발적인 증가에도 불구하고 인트라로지스틱스(intralogistics) 산업은 여러 어려움을 겪고 있습니다.
기존 자율 주행용 소프트웨어 애플리케이션은 각 로봇마다 처음부터 코딩해야 하는 경우가 많기 때문에 다양한 로봇에 자율 주행 기능을 적용하기가 까다로운데요, 창고, 공장, 주문 처리 센터는 백만 평방 피트(약 28,000평) 이상의 대규모로 운영되는 경우가 많아 로봇을 위한 매핑과 업데이트가 어렵습니다. 더불어 기존 워크플로우, 플릿 관리 및 창고 관리 시스템에 AMR을 통합하는 작업이 복잡할 수 있습니다.
아이작 AMR은 첨단 로보틱스 분야에 종사하거나 기존의 지게차, 무인 운반차를 완전자율주행로봇으로 마이그레이션하고자 하는 이들을 위해 청사진을 제공합니다. 이를 통해 완전 자율성으로의 마이그레이션 가속화, 비용 절감, 최신 AMR의 배포 속도 향상을 이룰 수 있습니다.
오린 기반 레퍼런스 아키텍처
아이작 AMR은 엔비디아 노바 오린(Nova Orin) 레퍼런스 아키텍처를 기반으로 구축되었습니다.
노바 오린은 아이작 AMR의 두뇌이자 눈입니다. 스테레오 카메라, 어안 카메라, 2D 및 3D 라이더를 포함한 여러 센서를 강력한 엔비디아 젯슨 AGX 오린(Jetson AGX Orin) 시스템 온 모듈(system-on-module)과 통합합니다. 레퍼런스 로봇 하드웨어는 사전 통합된 노바 오린과 함께 제공되므로 개발자가 자체 환경에서 아이작 AMR을 쉽게 평가할 수 있습니다.
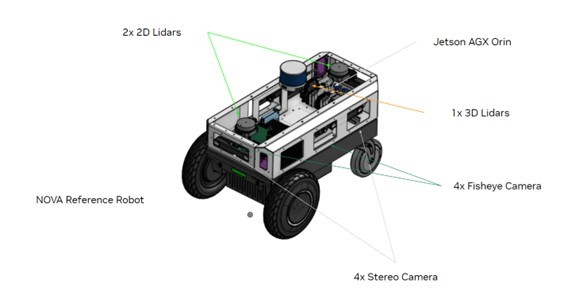
노바의 컴퓨팅 엔진인 오린은 275 TOPS(초당 테라 연산)의 엣지 컴퓨팅을 통해 실시간으로 실행할 수 있는 최신 AI 및 하드웨어로 가속된 알고리즘에 대한 액세스를 제공합니다.
그리고 동기화되고 보정된 센서 제품군은 실시간 3D 인식과 매핑을 위한 센서 다양성, 이중화 기능을 제공합니다. 기록, 업로드, 재생을 위한 클라우드 네이티브 툴을 사용해 손쉽게 디버깅, 맵 생성, 교육, 분석을 진행할 수 있습니다.
아이작 AMR: 매핑, 자율성, 시뮬레이션
아이작 AMR은 매핑, 자율성, 시뮬레이션을 위한 기반을 제공합니다.
아이작 AMR은 딥맵(DeepMap)의 클라우드 기반 서비스와 연계돼 대규모 시설의 로봇 매핑을 몇 주에서 며칠로 단축시켜 주는데요, 이로써 대규모 환경의 매핑과 시맨틱 이해를 가속화하고 고도로 숙련된 기술팀 없이도 센티미터 수준의 정확도를 제공합니다. 더불어 다양한 유형의 AMR에 대한 점유 맵과 시맨틱 맵을 만드는 데 사용할 수 있는 풍부한 3D 복셀 맵을 생성할 수 있습니다.

또한, 아이작 AMR은 엔비디아 cuOpt 소프트웨어를 사용한 클라우드 기반 플릿 최적화를 통해 다중 모드 내비게이션으로 자율성을 구현함으로써 매우 역동적이고 구조화되지 않은 대규모 환경에서 로봇을 개발하고 배포하는 시간을 단축시켜 줍니다.
가속화된 모듈식 프레임워크로 실시간 카메라 및 라이다 인식을 지원하며, 고급 경로 플래너, 동작 플래너, 시맨틱 정보를 사용한 계획 및 제어로 로봇이 복잡한 환경에서 자율적으로 작동할 수 있도록 합니다. 로코드, 노코드 인터페이스를 통해 다양한 시나리오와 사용 사례에 맞게 애플리케이션을 신속하게 개발하고 맞춤화할 수 있습니다.

마지막으로, 아이작 AMR은 산업 디지털화를 위한 개방형 개발 플랫폼인 엔비디아 옴니버스(Omniverse)로 구동되는 아이작 심(Sim)의 물리 기반 시뮬레이션을 활용해 로봇 작동을 단순화시킵니다. 이를 통해 디지털 트윈을 구현하고 실제 세계에 배포하기 전에 각 고객에 맞게 로봇 애플리케이션을 개발, 테스트, 맞춤화할 수 있어, AMR 배포의 운영 비용과 복잡성을 크게 줄일 수 있답니다.

아이작 AMR에 대한 얼리 액세스를 신청하고 싶다면 여기에서 확인해보세요!
참고 영상
엔비디아 아이작 AMR | 차세대 AMR을 위한 엔드투엔드 자율성 플랫폼