AI의 도움으로 로봇, 트랙터, 유모차, 심지어 스케이트장까지 자율 주행이 가능해졌습니다. 한 개발자인 카빌란 KB(Kabilan KB)는 휠체어에 자율 주행 기능을 탑재하여 장애인의 이동성을 개선하는 데 도움을 줄 수 있는 기술을 개발하고 있습니다.

인도 코임바토르에 위치한 카루냐 공과대학교의 학부생인 그는 엣지 AI 및 로보틱스를 위한 NVIDIA Jetson 플랫폼을 사용하여 자율 휠체어 프로젝트를 추진하고 있습니다.
이 자율 전동 휠체어는 USB 카메라와 함께 깊이 및 라이더 센서에 연결되어 주변 환경을 인식하고 사용자가 원하는 목적지까지 장애물 없는 경로를 계획할 수 있습니다.
“전동 휠체어를 사용하는 사람이 이동해야 할 위치를 알려주면 자율 내비게이션 시스템에 이미 프로그래밍되어 있거나 할당된 수치로 경로가 계획되어 있을 것입니다.”라고 KB는 설명합니다. “예를 들어, ‘1’을 누르면 부엌으로, ‘2’를 누르면 침실로 이동하면 자율주행 휠체어가 해당 위치로 이동합니다.”
NVIDIA Jetson Nano 개발자 키트는 카메라와 센서의 데이터를 실시간으로 처리합니다. 그런 다음 딥 러닝 기반 컴퓨터 비전 모델을 사용하여 환경의 장애물을 감지합니다.
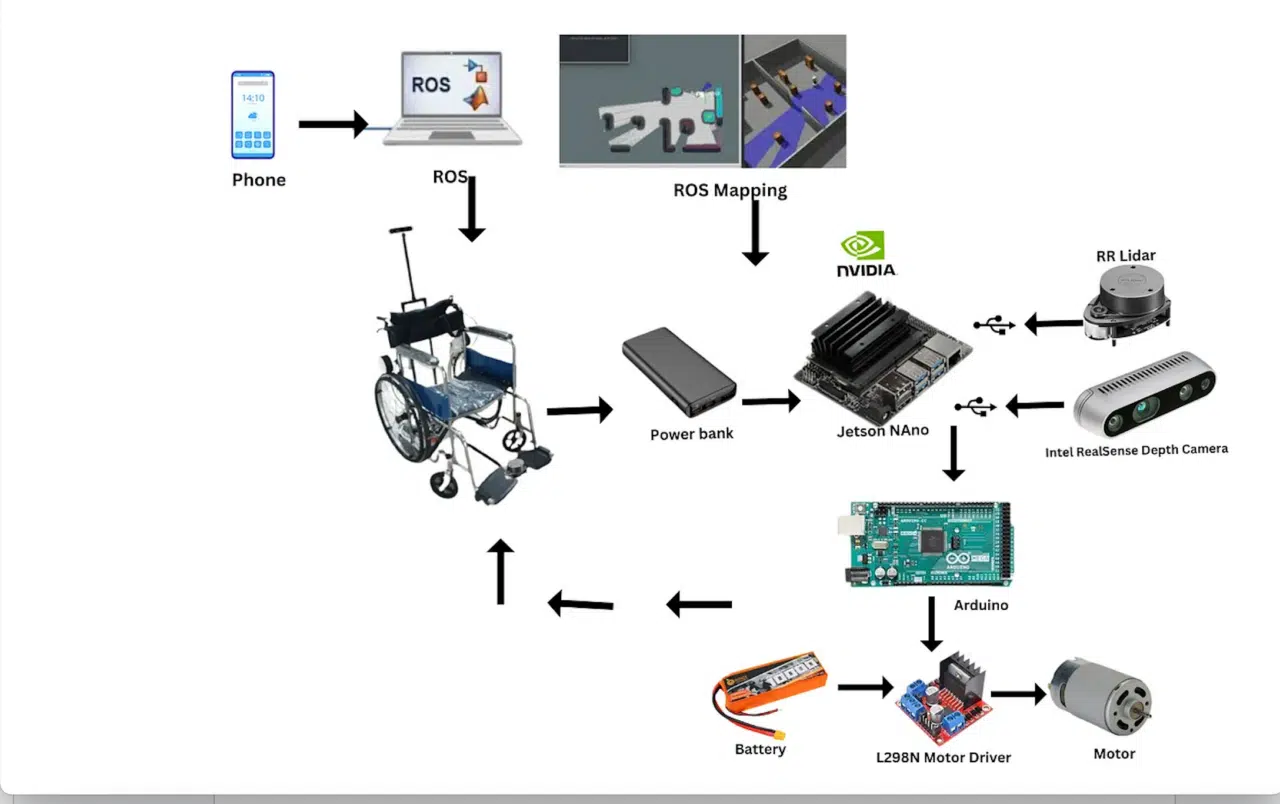
개발자 키트는 자율 시스템의 두뇌 역할을 하여 주변 환경에 대한 2D 지도를 생성하여 충돌 없는 목적지까지의 경로를 계획하고, 전동 휠체어에 업데이트된 신호를 전송하여 안전한 이동을 보장합니다.
제작자 소개
기계 공학을 전공한 KB는 팬데믹 기간 동안 여가 시간을 활용해 해당 주제에 대한 교육용 YouTube 동영상을 검색하면서 AI와 로봇 공학에 흥미를 갖게 되었습니다.
그는 현재 카루냐 공과대학교에서 로봇 공학 및 자동화 학사 학위를 취득하기 위해 노력 중이며 언젠가 로봇 스타트업을 창업하는 것이 꿈입니다.
자칭 독학파라고 자처하는 KB는 NVIDIA 딥 러닝 인스티튜트에서 “Jetson Nano에서 엣지에서 비디오 AI 애플리케이션 구축”, “확장 기능을 사용하여 Omniverse에서 개발, 사용자 지정 및 게시” 등 여러 자격증을 취득하기도 했습니다.
로봇 공학의 기초를 배운 후, 그는 OpenUSD 프레임워크 기반의 3D 툴과 애플리케이션을 구축하고 운영하기 위한 플랫폼인 NVIDIA Omniverse에서 시뮬레이션을 실험하기 시작했습니다.
“시뮬레이션에 Omniverse를 사용하면 합성 데이터 생성을 대신 사용할 수 있기 때문에 로봇의 프로토타입 모델 제작에 많은 투자를 할 필요가 없습니다.”라고 그는 말합니다. “미래의 소프트웨어입니다.”
영감의 원천
KB는 이 최신 NVIDIA Jetson 프로젝트를 통해 거동이 불편한 사촌과 수동 또는 전동 휠체어를 제어할 수 없는 다른 장애인에게 도움이 될 수 있는 장치를 만드는 것을 목표로 했습니다.
“때때로 사람들은 전동 휠체어를 살 돈이 없습니다.”라고 KB는 말합니다. “인도에서는 중상류층만 전동 휠체어를 살 수 있기 때문에 가장 기본적인 유형의 전동 휠체어를 사용하고 이를 젯슨에 연결하여 자율적으로 작동하도록 만들기로 결정했습니다.”
이 개인 프로젝트는 보스턴 아동 병원과 하버드 의과대학이 공동으로 설립한 글로벌 수술 및 사회 변화 프로그램에서 자금을 지원받았습니다.
Jetson 프로젝트
기본형 전동 휠체어를 구입한 후 모터 허브와 NVIDIA Jetson Nano, 라이더 및 심도 카메라를 연결했습니다.
그리고 로봇 애플리케이션을 구축하는 데 널리 사용되는 소프트웨어인 로봇 운영 체제(ROS)와 Jetson Nano의 YOLO 물체 감지 기능을 사용하여 자율 휠체어용 AI 알고리즘을 학습시켰습니다.
휠체어는 이러한 알고리즘을 활용하여 주변 환경을 인식하고 매핑하여 충돌 없는 경로를 계획할 수 있습니다.
지난 6월부터 이 프로젝트의 프로토타입을 개발해 온 KB는 “NVIDIA Jetson Nano의 실시간 처리 속도는 사용자의 지연이나 지연을 방지합니다.”라고 말합니다. 이 개발자는 자신의 블로그에서 자율주행 휠체어의 기술적 구성 요소에 대해 자세히 설명합니다. 카루냐 혁신 및 디자인 스튜디오 유튜브 채널에도 자율주행 휠체어 데모가 소개되어 있습니다.
향후에는 머신러닝 알고리즘에 연결된 뇌파 또는 뇌전도의 뇌 신호를 사용하여 휠체어를 제어할 수 있도록 프로젝트를 확장할 수 있을 것으로 기대하고 있습니다.
“전신이 불편한 사람이 ‘저기 가고 싶다’는 생각만으로 휠체어를 제어할 수 있는 제품을 만들고 싶습니다.”라고 KB는 말했습니다.
NVIDIA Jetson 플랫폼에 대해 자세히 알아보세요.