GPU를 통해 현실화된 자율 로봇 수술

만약 누군가가 부득이하게 수술을 받아야 하는 상황이라면 최고의 실력과 검증된 경험, 안정적인 손의 움직임을 지닌 의사를 원하겠죠? 하지만 앞으로는 훌륭한 ‘로봇’을 원할 수도 있습니다!
워싱턴 DC에 있는 국립 아동 병원(Children’s National Medical Center, CNMC)의 학자들은 연조직 수술을 자율적으로 처리할 수 있는 로봇 의사를 실현시키기 위해 노력하고 있는데요, 이제 앞으로 특히 외과 수술실에는 한 치의 오차도 허용하지 않는 로봇 의사가 함께하지 않을까요?

스마트 조직 자율 로봇(Smart Tissue Autonomous Robot, STAR)은 1mm 이하의 오차로 생체조직을 수술합니다.
‘자율성’을 높여라!
로봇 수술의 기원은 브리티시 컬럼비아 대학(University of British Columbia)에서 정형외과 수술 보조용 로봇을 개발했던 1980년대로 거슬러 올라갑니다. 그 후 30여 년이 지났지만 아직도 수술실에는 ‘사람’ 의사가 있어야 하며 로봇은 독립적으로 복잡한 수술은 아직 하지 못합니다. 그렇지만 비약적인 GPU의 발전 덕분에 보다 안전하면서 편리하게 적은 비용으로 로봇을 활용한 수술을 받을 수 있게 되었습니다.
이에 대해 CNMC의 수석 외과의사이자 프로젝트 수석 연구원인 피터 김(Peter Kim)씨는 다음과 같이 말했는데요,
“사람을 아예 쓰지 않는 것이 아니라 지능형 옵션이나 솔루션을 제공하여
의사의 역량과 능력을 강화하는 것이 목표입니다.”
현재 사용되는 로봇들은 대개 의사의 지시 아래 상대적으로 반복적인 간단한 수술을 자율적으로 실시하고 있습니다. 아직 로봇의 수술은 인간 의사의 지시 아래에 있지요. 그래서 피터 씨와 연구팀은 현 상황에서 나아가 연조직에 대해 보다 섬세한 수술을 자율적으로 할 수 있는 로봇을 개발하고자 연구 중에 있답니다.
1mm 이하의 오차를 자랑하는 로봇 수술
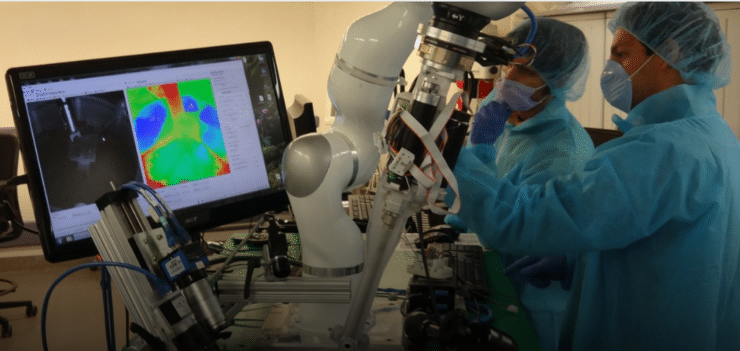
피터 씨가 지도하는 연구팀은 엔비디아의 GeForce GTX TITAN GPU를 기반으로 혁신적인 의학 기술을 이용하여 Smart Tissue Autonomous Robot(STAR)를 개발했습니다. STAR는 3D 광계(Plenoptic) 카메라와 근적외선 시야를 이용한 사람의 팔의 모습과 유사한 장치로,1mm 이하의 오차로 조직의 위치를 정확하게 찾아 내 수술할 수 있습니다.
또한 연구팀은 복강경 봉합 도구에 센서 기능을 추가하여 STAR가 조직에 닿았을 시의 장력과 압박을 느낄 수 있게 만들었습니다. 이 외에도 복잡한 외과적 작업을 수행할 수 있는 방식을 STAR에 프로그래밍하기도 했습니다. 이러한 노력은 최근에 사이언스 중개의학(Science Translational Medicine)이라는 학술지를 통해 소개되기도 했죠
피터 씨는 조지 워싱턴 의과대학(George Washington University School of Medicine)에서 외과 교수로도 활동하고 있는데요. STAR의 기능을 테스트하기 위해 STAR로 하여금 돼지 내장의 문합술을 실시하도록 했습니다.
이 팀이 문합술을 택한 이유는 상대적으로 흔하면서 복잡한 수술법으로 미국에서 연간 1백만회 이상 실시되며 인간이 제어하지 않은 상태로 순전히 기계가 실시한 적이 없기 때문입니다. 신체의 내강에 있는 장기와 장기를 서로 접합시켜 잇는 수술이거든요. 이 문합술은 개념적으로 끊어진 호스를 연결하는 작업과 비슷합니다. 봉합부위가 튼튼히 연결되고 규칙적인 간격을 유지하여 새는 부위가 없도록 봉합해야 합니다.
STAR의 놀라운 성과
그 결과 STAR는 최초의 자율 문합술을 완벽하게 성공했을 뿐만 아니라 경험이 많은 의사가 실시한 결과물보다 일관성이 너무나 훌륭하게 유지된 것으로 나타났습니다. 이에 피터 씨는 다음과 같이 평했습니다.
“정말 깜짝 놀란 점은 대단한 지능이 없어도 이 작업이 가능했다는 것입니다.”
GPU는 STAR에서 핵심적인 부분입니다. 수술 현장에서 발산되는 빛에 관한 정보를 캡처하는 광계 카메라로부터 전송되는 데이터의 연산 속도를 높이는 역할을 하거든요. 이를 통해 STAR는 실시간으로 수술 대상 조직의 위치를 파악하고 추적할 수 있게 됩니다.
피터 씨는 STAR가 충분한 인식능력과 지능을 가지고 있으므로 부위, 장소, 시간을 불문하고 최적의 수술을 실행하기에 결국 로봇 수술 분야를 선도할 것이라고 이야기합니다. 특히 더 많은 지각, 시야, 인식 데이터가 STAR에게 공급되고 병렬 프로세싱과 같은 우수한 컴퓨팅 접근법이 적용되면 더욱 빠른 시일 내에 실현 가능할 것이라고 보고 있습니다.
“자율주행 자동차의 경우에는 먼저 정속 주행 제어에서 시작하여, 자동 주차, 차선 경고, 자율 정지,
그리고 결국 완벽한 자율 주행이 가능하게 됩니다. 그 목표는 생명을 구하고 사고를 방지하는 것입니다.
자율 수술을 비롯한 지능형 수술의 목표 역시 다를 것 없습니다.”
엔프 여러분들은 물론 많은 사람들이 보다 완벽한 수술을 위해 언젠가 다음과 같이 물어볼 수 있겠지요. “제 수술에 로봇 의사도 참여하나요?”