
2020년의 학자 Mory Gharib과 Alireza Ramezani는 말 그대로 이 세상에 존재하지 않는 변신 로봇을 개발했습니다: 바로 NASA 화성 탐사선 임무입니다.
칼텍(Caltech)은 비행, 운전, 보행은 물론 여러 가지 기술을 조합하여 8가지 동작을 수행할 수 있는 로봇을 공개했습니다. 이 로봇을 멀티모달 모빌리티 모포봇(M4)이라고 부르며, 엣지 AI 및 로보틱스를 위한 NVIDIA Jetson 플랫폼으로 구현되었습니다.
칼텍의 항공 및 바이오 영감 공학 교수인 Gharib은 “우리가 하고자 하는 기능의 수가 늘어났습니다.”라고 말했습니다. “설계 팀에 제안했을 때 처음에는 모두 ‘안 된다’고 말했습니다.”
칼텍은 초기 연구에 자금을 지원했고, NASA와 제트추진연구소(JPL)는 다음 단계에 자금을 지원했으며, 지난 여름 노스이스턴 대학교의 전기 및 컴퓨터 공학 조교수인 Ramezani를 JPL의 교수 연구원으로 영입하여 추가 개발에 착수했습니다.
현재 NASA에서 화성 탐사 로버 후보로 M42 버전을 개발 중이며 미국 교통부에서도 관심을 갖고 있다고 가립은 말했습니다.
그는 “현재 NASA에서 착륙 중 변신에 대한 테스트를 진행하고 있습니다.”라고 말했습니다.
그리고 최근 네이처 커뮤니케이션즈에 이 논문을 발표한 이후 제안이 쇄도하고 있다고 가리브는 말했습니다.
“갑자기 이렇게 많은 관심을 받게 되어 어지러울 정도입니다, 여러 조직에서 서로 다른 일을 하고 싶어하며 우리에게 다가오고 있습니다.”
소방, 수색 및 구조 작업
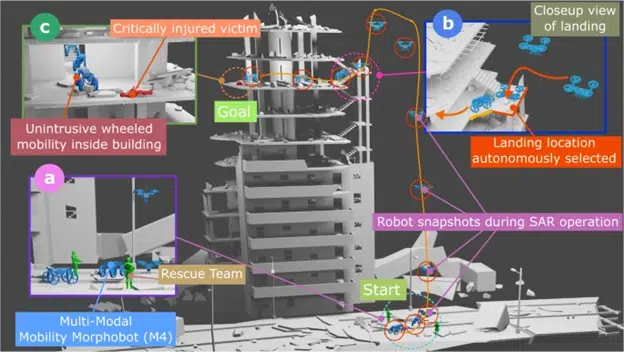
논문을 작성한 칼텍 팀(Gharib과 Ramezani, 그리고 칼텍의 항공우주학 박사후 연구원 Eric Sihite, JPL의 Arash Kalantari, CAST의 설계 엔지니어 Reza Nemovi)은 M4가 수색 및 구조 등 다양한 분야의 임무 요건에 맞게 설계되었다고 설명했습니다.
예를 들어, 화재 지역과 같이 구르거나 걸어서 들어갈 수 없는 지역에서는 카메라와 센서를 사용하여 비행하면서 정찰을 수행하여 상황을 평가할 수 있습니다.
Gharib에 따르면, 로스앤젤레스 지역의 여러 소방서에서 M4에 관심을 보이며 연락을 해왔다고 합니다.
그는 “응급 구조대원에게는 안전한 지역에 착륙한 후 현장으로 진입해야 하기 때문에 이 점이 매우 중요합니다.”라고 말했습니다.
작업을 완료하는 다목적 드론 배송
칼텍 팀은 M4를 사용하여 드론 배송의 복잡한 문제도 해결하는 것을 목표로 하고 있습니다. Gharib은 드론 배송은 이 로봇에 있어 “아직 열매를 맺지 못한 과일”이라고 말합니다.
기존의 배달용 드론은 안전상의 이유로 드론이 집이나 회사 근처에 착륙하는 것을 원하지 않기 때문에 문제가 있다고 그는 말했습니다. M4는 사람으로부터 멀리 떨어진 곳에 착륙한 다음 운전하여 배송을 완료할 수 있으므로 더 안전한 옵션이라고 그는 덧붙였습니다.
M4는 또한 트럭 배달이 진입하기 어렵거나 아예 배달 서비스를 제공할 수 없는 지역으로 비행할 수도 있습니다.
“트럭 배달이 갈 수 없는 곳이 많이 있습니다.”라고 그는 말했습니다.
현재 M4는 시속 40마일의 속도로 주행할 수 있으며 배터리는 한 번 충전으로 최대 30분까지 지속됩니다. 하지만 팀은 더 긴 비행 시간, 더 큰 탑재량, 더 긴 비행 거리를 가진 더 큰 드론을 설계하기 위해 노력하고 있습니다.
하늘은 한계가 없습니다.
NVIDIA Jetson Nano에 대해 알아보세요.