
세상과 세상의 모든 지형을 상세하게 보여주는 지도가 인공지능(AI)이 사전에 안전한 운전 결정을 내려야 할 때 필요한 식견을 제공하게 됩니다.
이번 GTC 2022 키노트에서 NVIDIA 설립자 겸 CEO 젠슨 황(Jensen Huang)은 안전성을 높이는 동시에 최고 수준의 자율성을 실현하도록 설계된 멀티모달 매핑 플랫폼인 NVIDIA DRIVE Map을 소개했습니다. DeepMap 실측 지도의 정확성과 AI 기반 크라우드 소싱 지도의 최신성과 규모를 결합한 플랫폼입니다.
카메라, 라이더, 레이더의 3가지 위치 식별(localization) 레이어를 갖춘 DRIVE Map은 최첨단 AI 드라이버에 필요한 다중성(redundancy)과 범용성을 제공합니다.
DRIVE Map은 2024년까지 북미와 유럽, 아시아 내의 50만km 도로에 대해 실측 조사 수준의 지상 지도를 제공할 예정입니다. 이 지도는 수백만 대의 승용차로 지속적으로 업데이트되고 확장됩니다.
NVIDIA DRIVE Map은 자율주행 자동차 업계 전반에서 이용 가능합니다.
멀티 레이어가 포함된 DRIVE Map
DRIVE Map에는 카메라, 레이더, 라이다 모달리티로 사용할 수 있는 여러 위치식별(localization) 레이어가 포함됐습니다. DRIVE Map은 지도의 각 레이어에 따라 독립적으로 위치 식별을 할 수 있어서, 최고 수준의 자율성에 필요한 다양성과 다중성을 제공합니다.
카메라 위치식별 레이어는 차선 구분선, 도로 표시, 도로 경계, 신호등, 표지판과 기둥과 같은 지도 속성으로 구성됩니다.
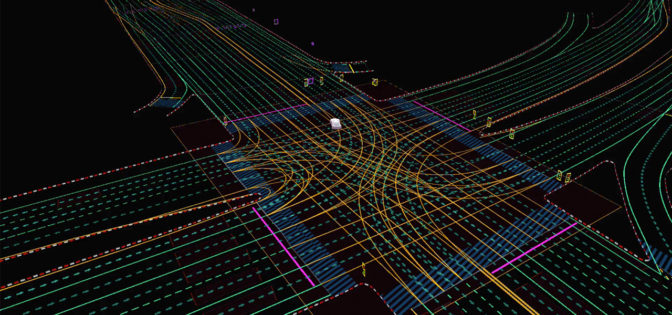
레이더 위치식별 레이어는 레이더 리턴(return)의 집합적 포인트 클라우드(point cloud)입니다. 특히 카메라의 부하가 높은 조명 조건이나 카메라나 라이더에 부하가 걸리는 악천후 상황에서 유용하죠.
일반적인 지도 속성으로는 식별이 불가능한 교외 지역에서도 레이더 위치 식별이 유용해, DRIVE Map은 레이더 리턴을 생성하는 주변 물체를 기반으로 위치를 잡아낼 수 있습니다.
라이다 복셀(voxel) 레이어는 환경을 가장 정확하고 안정적으로 표현합니다. 또한 카메라와 레이더로는 달성할 수 없는 정확도인 5cm 해상도로 세계를 3D로 표현하죠.

일단 지도에 위치 식별을 마치면, DRIVE Map은 지도가 제공하는 상세한 시맨틱 정보를 이용해 사전에 계획을 세우고 안전한 운전 결정을 내릴 수 있습니다.
양쪽 지도 엔진의 장점을 결합한 DRIVE Map
DRIVE Map은 지상 실측 지도 엔진과 크라우드 소싱 지도 엔진으로 구성된 2개의 지도 엔진으로 만들어져 지구 규모의 지대에 대한 전체 정보를 수집하고 유지합니다.
이 독특한 접근 방식은 양측의 장점을 결합해 측량 전문 자동차로 센티미터 수준의 정확도를 달성할 뿐 아니라 수백만 대의 승용차가 지속적으로 지도를 업데이트하고 확장해야 달성할 수 있는 최신성과 규모를 달성합니다.
지상 실측 엔진은 DeepMap 실측 지도 엔진을 기반으로 하여 지난 6년간 개발 및 검증된 기술입니다.
AI 기반의 크라우드 소싱 엔진은 주행하는 수백만 대의 자동차로부터 업데이트된 지도 정보를 수집하여 새로운 데이터를 클라우드에 지속적으로 업로드합니다. 그런 다음 데이터는 NVIDIA Omniverse에서 완전한 충실도로 모아져 지도 업데이트에 사용되며, 몇 시간내로 실제 차량에 최신 지도 정보를 무선 업데이트합니다.
또한 DRIVE Map은 데이터 인터페이스인 DRIVE MapStream을 통해 DRIVE MapStream 요구 사항을 충족하는 승용차가 카메라, 레이더와 라이더 데이터를 사용해 지도를 지속적으로 업데이트하도록 지원합니다.
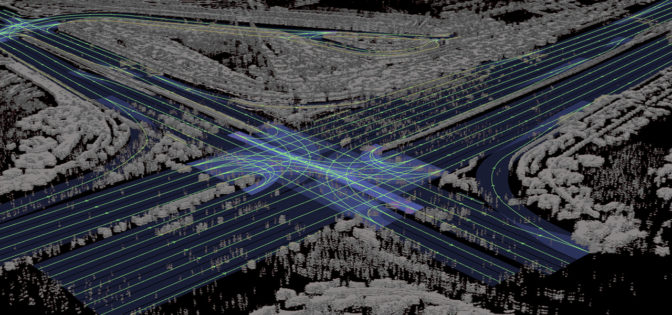
지구 규모의 디지털 트윈
DRIVE Map은 AI가 최적의 주행 결정을 내리도록 지원하는 것은 물론, 심층 신경망(DNN) 훈련, 테스트와 검증을 위한 지상 실측 훈련 데이터를 생성하면서 자율주행 자동차(AV) 개발을 가속화합니다.
이런 워크플로우의 중심에는 실제 지도 데이터가 로딩되고 저장되는 Omniverse가 있는데요. Omniverse는 지도 측량 자동차와 수백만 대의 승용차가 지속적으로 업데이트하고 확장하는 디지털 트윈을 지구 규모로 표현합니다.
Omniverse에 내장된 자동 콘텐츠 생성 도구를 통해 상세히 표현된 지도는 NVIDIA DRIVE Sim으로 사용될 수 있는 주행 가능한 시뮬레이션 환경으로 변환됩니다. 도로 고도, 도로 표시, 섬, 교통 신호, 표지판, 수직 기둥과 같은 지형적 특징들은 센티미터 수준의 정확도로 정확하게 복제됩니다.
자율주행 자동차 개발자는 물리적 기반 센서 시뮬레이션과 도메인 랜덤화를 통해 시뮬레이션 환경을 사용해 실제 데이터에서 사용할 수 없는 훈련 시나리오를 생성할 수 있습니다.
또한 시나리오 생성 도구를 적용해 AV 소프트웨어를 디지털 트윈 환경에서 테스트한 다음 자율주행 자동차를 실제 환경에 배치할 수 있죠. 마지막으로, 디지털 트윈은 자동차가 실제 세계에서 운행될 때의 환경을 가상으로 완벽하게 구현한 장면을 운행자들에게 제공함으로써 필요시 원격 조작을 지원할 수 있습니다.
고도로 다양한 기능과 확장성이 뛰어난 플랫폼인 DRIVE Map은 자율주행 기능을 지속적으로 발전시키는 데 필요한 세상에 대한 정보를 AI 운전자에게 제공합니다.