CES 2023에서 NVIDIA Isaac Sim의 주요 업데이트가 발표됐습니다. Isaac Sim은 다양한 작동 조건으로 실제와 같은 환경에서 가상 로봇을 구축하고 테스트하는 로봇 시뮬레이션 도구입니다. 클라우드에서 액세스할 수 있는 Isaac Sim은 메타버스 애플리케이션을 만들고 운영하기 위한 플랫폼인 NVIDIA Omniverse에 구축됐죠.
공급망 문제와 인력 부족을 해결하기 위해 자동화를 채택하면서 지능형 로봇에 대한 수요가 증가하고 있는데요.
ABI 리서치에 따르면, 산업용 및 상업용 로봇의 설치 기반은 2020년 310만 대에서 2030년 2천만 대까지 6.4배 이상 성장할 것으로 예상됩니다. 이러한 새로운 AI 기반 로봇을 개발, 검증, 배포하려면 로봇을 현실적인 시나리오에 배치하는 시뮬레이션 기술이 필요합니다.
로봇 공학자를 위한 강력한 AI 기반 기능
인간이 협동 로봇(코봇, cobot) 또는 자율 이동 로봇(AMR)과 함께 작업하게 되면서 시뮬레이션에 사람과 그들의 일반적인 행동을 추가하는 것이 중요해졌는데요.
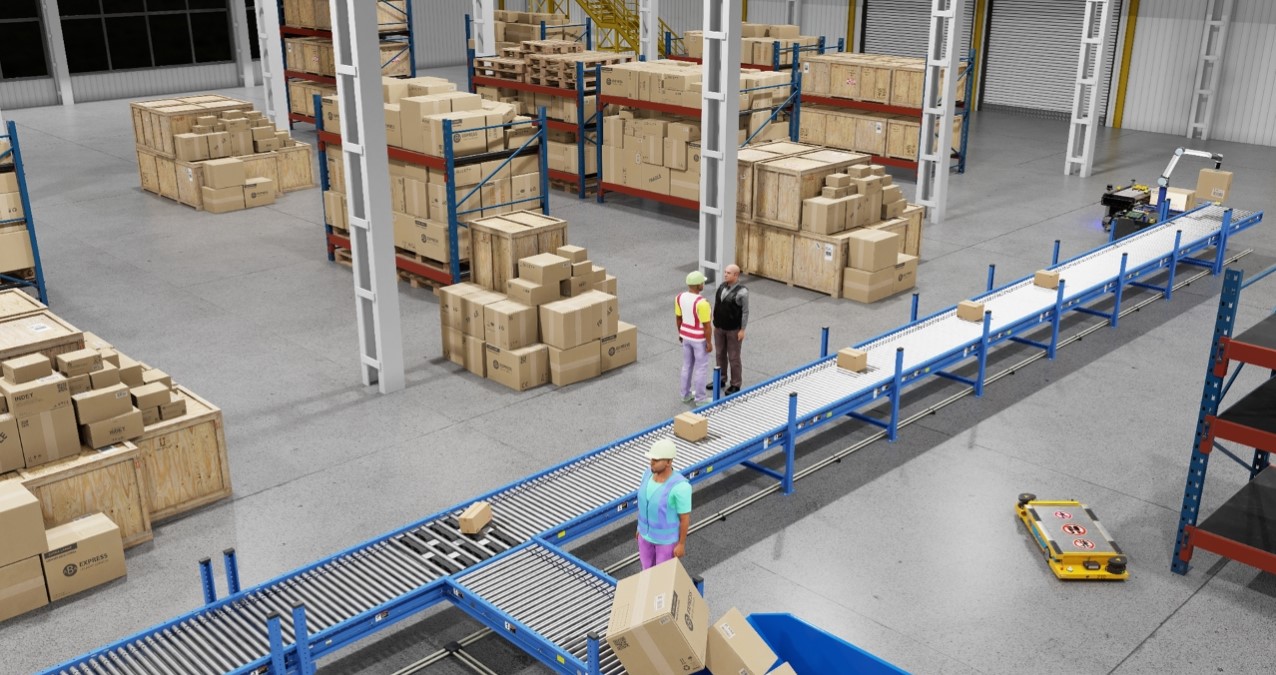
Isaac Sim의 새로운 사람 시뮬레이션 기능을 통해 인간 캐릭터를 창고, 제조 시설에 추가하고 패키지를 쌓거나 카트를 미는 등의 익숙한 동작을 실행할 수 있습니다. 가장 일반적인 동작의 대부분은 이미 지원되고 있어서, 시뮬레이션하는 것은 명령을 내리는 것만큼 간단합니다.
시뮬레이션 세계에서 관찰된 결과와 실제 세계에서 관찰된 결과 간의 차이를 최소화하기 위해 물리적으로 정확한 센서 모델이 있어야 합니다.
NVIDIA RTX 기술을 사용해 Isaac Sim은 이제 센서에서 물리적으로 정확한 데이터를 실시간으로 렌더링할 수 있습니다. RTX 시뮬레이션 라이다(lidar)의 경우, 레이 트레이싱은 다양한 조명 조건 또는 반사 물질에 대응하여 보다 정확한 센서 데이터를 제공합니다.
또한 Isaac Sim은 물리적으로 정확한 시뮬레이션 환경을 구축하는 데 중요한 수많은 새로운 시뮬레이션 지원 3D 애셋을 제공합니다. 창고 부품에서 인기 있는 로봇에 이르기까지 모든 것이 준비되어 있어서, 개발자와 사용자가 신속하게 구축을 시작할 수 있습니다.
로보틱스 연구자를 위한 중요한 새로운 기능에는 강화 학습을 위한 Isaac Gym과 협업 로봇 프로그래밍을 위한 Isaac Cortex의 발전을 포함됩니다. 추가적으로, 새로운 도구인 Isaac ORBIT은 시뮬레이션 운영 환경과 로봇 학습, 동작 계획을 위한 벤치마크를 제공합니다.
로봇 운영 체제(ROS) 개발자의 대규모 커뮤니티를 위해 Isaac Sim은 ROS 2 험블(Humble) 및 윈도우(Windows)에 대한 지원을 업그레이드합니다. 이를 통해 Isaac ROS 소프트웨어를 시뮬레이션에서 사용할 수 있습니다.
Isaac 플랫폼 기능과 생태계 확장으로 채택 촉진
크고 복잡한 로보틱스 생태계는 물류 및 제조에서 소매, 에너지, 지속 가능한 농업 등 다양한 산업에 걸쳐 있습니다.
엔드 투 엔드 Isaac 로보틱스 플랫폼은 고급 AI 및 시뮬레이션 소프트웨어는 물론, 로보틱스 생태계에 가속화된 컴퓨팅 기능을 제공합니다. 백만 명 이상의 개발자와 천 개 이상의 회사가 플랫폼의 하나 또는 여러 부분에 의존하죠. Isaac Sim을 사용해 가상 세계에서 개발, 테스트한 실제 로봇을 배치한 다수 기업도 포함됩니다.
텔레익지스턴스(Telexistence)는 일본 300개 편의점에 음료 재입고 로봇을 배치했습니다. 안전을 개선하기 위해 도이치반(Deutsche Bahn)은 AI 모델을 교육해 열차 선로에 수하물이 떨어지는 것과 같이 현실 세계에서는 드물게 발생하는 매우 중요하지만 예상치 못한 코너 케이스를 처리하도록 했죠. 사코스 로보틱스(Sarcos Robotics)는 재생 가능 에너지 설비에서 태양광 패널을 선택하고 배치하는 로봇을 개발하고 있습니다.
페스토(Festo)는 Isaac Cortex를 사용해 코봇 프로그래밍을 단순화하고 시뮬레이션 기술을 물리적 로봇에 전달합니다. 프라운호퍼(Fraunhofer)는 Isaac Sim의 물리적으로 정확하고 충실도가 높은 시각화 기능을 사용해 고급 AMR을 개발하고 있죠. 플랙시브(Flexiv)는 AI 모델 훈련을 위한 합성 데이터 생성에 Isaac Replicator를 사용하고 있습니다.
로봇을 훈련시키는 것도 중요하지만, 시뮬레이션은 로봇과 함께 작업하고 프로그램을 작성하도록 작업자를 훈련시키는 데 중요한 역할을 합니다. 레디 로보틱스(Ready Robotics)는 Isaac Sim과 함께 산업용 로봇의 프로그래밍을 교육하고 있습니다. 유니버셜 로보틱스(Universal Robotics)는 인력 개발을 위해 Isaac Sim을 사용해 클라우드에서 최종 운영자를 훈련하고 있습니다.
클라우드 액세스를 통해 어디서나 Isaac 플랫폼 사용
클라우드에서 사용할 수 있는 Isaac Sim을 통해 로보틱스 프로젝트에 참여하는 글로벌 다양한 분야의 팀은 가상 로봇을 테스트하고 훈련하기 위해 향상된 접근성, 민첩성, 확장성으로 협업할 수 있습니다.
적절한 훈련 데이터가 부족하면 로보틱스 시스템으로 새 시설을 구축하거나 기존 자율 시스템을 확장할 때 배치가 방해를 받는 경우가 많은데요. Isaac Sim은 Isaac Replicator를 활용해 개발자가 실제 환경의 물리학을 모방하는 대규모 실측 정보 데이터 세트를 만들 수 있도록 합니다.
일단 배치되면 자동화 요구 사항이 확장됨에 따라 수백 대의 로봇을 효율적으로 운영하기 위해 동적 경로 계획이 필요합니다. 실시간 함대 작업 할당과 경로 계획 엔진인 NVIDIA cuOpt는 자동화를 통해 운영 효율성을 개선합니다.
Isaac Sim으로부터 시작하기
Isaac Sim을 다운로드하여 여기에서 새로운 플랫폼 기능에 대한 자세한 기술 정보를 확인할 수 있습니다.
여기에서 경영진이 자율 시스템, 로보틱스, 디자인, 시뮬레이션 등의 제품, 파트너십, 제품을 공개한 NVIDIA의 CES 스페셜 이벤트를 시청할 수 있습니다.