
이 방향 저 방향으로 빠르게 움직이는 비행기와 헬리콥터, 드론으로 가득한 하늘을 탐색하는 상황을 한번 상상해 보세요. 혼잡한 교통상황을 탐색하기란 제 아무리 베테랑 운전자라도 쉽지 않은 일일 텝니다.
최근 개최된 GPU 기술 컨퍼런스 에 참석한 미국 콜로라도 소재 시스템 엔지니어링 업체 패스파인더 시스템스(Pathfinder Systems)의 쉴라 재슬릭(Sheila Jaszlics) 대표는 NVIDIA Jetson TX2 모듈을 활용해 이러한 어려움을 해결했다고 말했습니다.
패스파인더는 소형 민간 시험 비행선의 윙팁에 Jetson TX2 모듈 한 쌍을 장착해 다른 항공기를 인식하고 조종사와 무인 항공기가 이를 피해갈 수 있도록 안내합니다.
미국 캘리포니아주에 위치한 에드워드 공군 기지에서 자사 시스템 상공 테스트를 실시한 재슬릭 패스파인더 대표는 “시험 비행은 전체 개발 프로세스에 있어 핵심이었습니다. 에드워드 공군 기지에는 패러슈트, 글라이더, 범용 항공, 상용 항공 노선 등 네 가지 군용 서비스에 필요한 요소가 다 있죠”라고 말했습니다.
패스파인더 시스템에는 배터리, Wi-Fi, GPS 모듈, Jetson TX2탑재 항공기 날개가 장착된 모듈 한 쌍이 포함돼 있습니다.
비행기 중간에 Jetson TX2 장착 모듈이 또 하나 있는데요, 패스파인더가 해결한 문제점 가운데는 항공기 날기 위치를 모델링 해 여기 설치된 카메라가 정확한 입체 영상을 얻을 수 있도록 하는 것이었죠. 패스파인더는 이 작업이 완료되면 Jetson TX2를 활용해 다른 항공기를 식별하고 그 속도와 궤도를 모델링 했습니다.
이 시스템은 엔비디아 JetPack 소프트웨어 일부로 포함된 객체 탐지용 디텍트넷(DetectNet) 딥 뉴럴 네트워크를 사용해 매우 빠르게 학습했습니다. 재슬릭 사장의 설명에 따르면 이 시스템에 다른 비행기 예시 500건을 보여줬을 때 충분히 사용 가능한 결과물을 냈으며, 수 천 건을 보여줬을 때 경계 박스 추가 개선이 이뤄졌다고 하네요. 재슬릭 대표는 “아주 잘 작동했습니다. 뛰어난 항공기 감지 능력을 보여줬죠”라고 말했습니다.
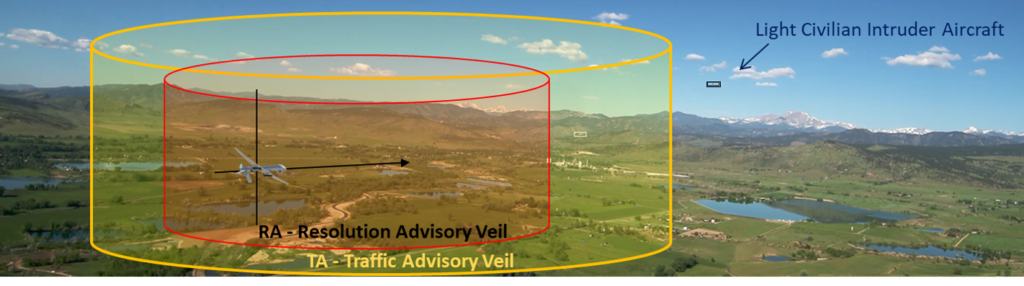
패스파인더의 테스트 시스템은 자체 카메라만 사용해 다른 항공기 위치를 파악할 수 있었으며 (다른 테스트 항공기에 탑재된 GPS 시스템으로 파악한 것), 조종사에 주변 항공기와의 충돌을 피하기 위해 사용 가능한 경로와 그렇지 않은 경로를 보여주었습니다.
패스파인더 시스템이 진행할 다음 단계는 미국 공군과 계약 하에 개발 중인 시스템으로, 항공기 외부에 장착하는 것이 아닌, 항공기에 바로 탑재할 수 있는 시스템을 만드는 것입니다.
이 얇고 가벼운 시스템은 조종사의 유무에 관계 없이 드론과 다른 비행기에 주변 상황에 대한 360도 전경과 인근 다른 항공기와의 충돌을 피할 수 있는 방법을 안내할 수 있습니다.
이미지 제공: NASA