새로운 Physical AI Data Factory Blueprint를 소개합니다! 개방형 레퍼런스 아키텍처인 새로운 Blueprint는 훈련 데이터 생성, 증강, 평가 과정을 통합하고 자동화해 대규모 피지컬 AI 시스템 훈련에 드는 비용, 시간, 복잡성을 획기적으로 줄입니다.
개발자는 이를 사용해 NVIDIA Cosmos™ 오픈 월드 파운데이션 모델과 선도적인 코딩 에이전트로 제한된 훈련 데이터를 방대하고 다양한 데이터세트로 변환할 수 있는데요. 여기에는 비용과 시간이 많이 들고 현실 세계에서 포착하기 어려운 돌발 상황과 롱테일(long-tail) 시나리오도 포함됩니다.
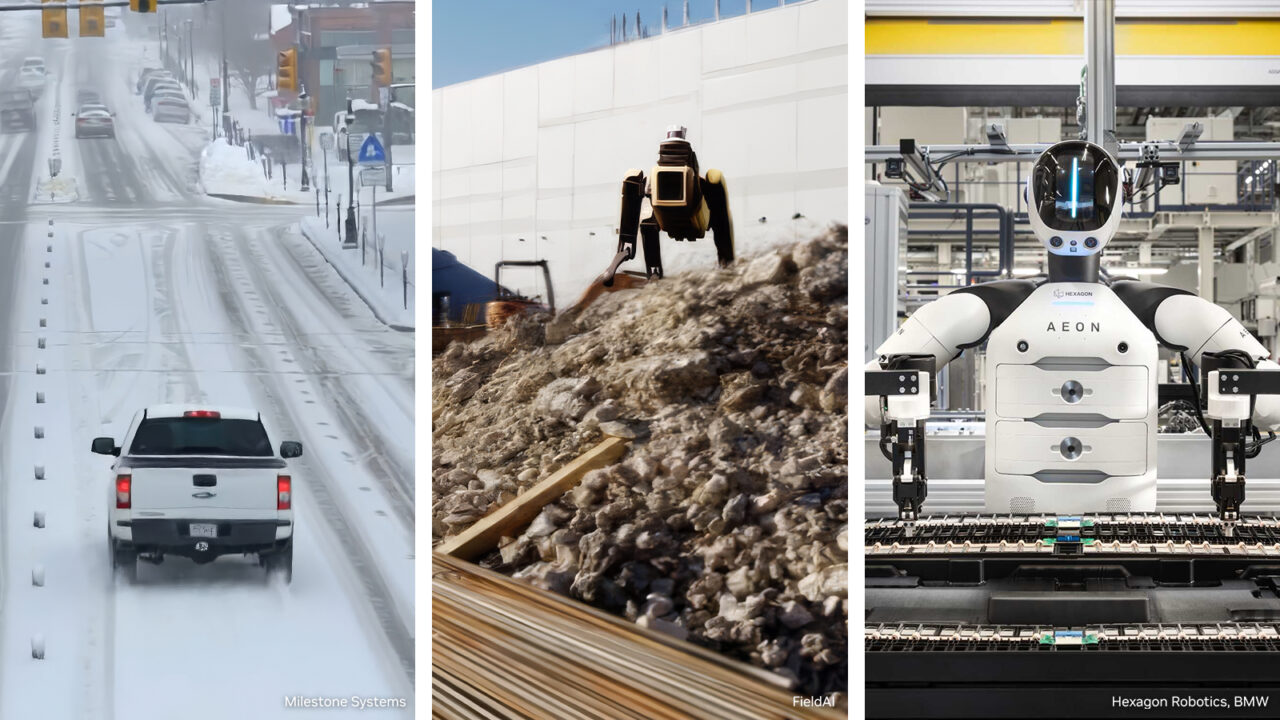
NVIDIA는 마이크로소프트 애저(Microsoft Azure), 네비우스(Nebius)와의 협력을 통해 개방형 Blueprint를 각 회사의 클라우드 인프라와 서비스에 통합하고 있습니다. 이를 통해 개발자가 가속 컴퓨팅 성능을 대규모 훈련 데이터로 즉시 전환할 수 있도록 지원하고 있죠. 필드AI(FieldAI), 헥사곤 로보틱스(Hexagon Robotics), 링커 비전(Linker Vision), 마일스톤 시스템즈(Milestone Systems), 로보포스(Robo Force), 스킬드 AI(Skild AI), 테라다인 로보틱스(Teradyne Robotics), 우버(Uber) 등 선도적인 피지컬 AI 개발사들은 Blueprint를 활용해 로보틱스, 비전 AI 에이전트, 자율주행 자동차 개발을 가속하고 있습니다.
NVIDIA Omniverse·시뮬레이션 기술 부문 부사장 Rev Lebaredian은 “피지컬 AI는 AI 혁명의 다음 단계로, 방대한 양의 데이터를 생성하는 능력에 성공 여부가 달려 있습니다. 저희는 클라우드 선도 기업들과 협력해 컴퓨팅을 고품질 데이터로 전환하고, 차세대 자율 시스템과 로봇을 현실로 구현하는 새로운 유형의 에이전트 엔진을 제공하고 있죠. 이 새로운 시대에서 컴퓨팅은 곧 데이터가 될 것입니다”라고 말했습니다.
피지컬 AI 개발을 위한 통합 엔진
피지컬 AI는 스케일링 법칙을 따릅니다. 데이터, 컴퓨팅, 모델 용량이 커질수록 성능도 향상되는데요. NVIDIA Physical AI Data Factory Blueprint는 모듈형 자동 워크플로우를 통해 원본 데이터를 모델 학습용 데이터세트로 전환하는 단일 레퍼런스 아키텍처입니다:
- 선별과 검색: NVIDIA Cosmos Curator는 대규모 실제 합성 데이터세트를 처리, 정제하며 주석 작업까지 수행합니다.
- 확장과 증식: Cosmos Transfer는 선별된 데이터를 기하급수적으로 확장하고 다양화해 실제 데이터와 시뮬레이션 데이터를 확대하고, 희귀한 롱테일 상황도 다양한 환경과 조명 조건에서 포착할 수 있도록 지원합니다.
- 평가와 검증: NVIDIA Cosmos Evaluator는 Cosmos Reason 모델을 기반으로, 현재 GitHub에서 이용 가능합니다. 생성된 데이터를 자동으로 점수화하고 검증, 필터링해 물리적 정확성과 모델 훈련에 바로 활용 가능한 상태를 보장합니다.
NVIDIA Physical AI Data Factory Blueprint는 롱테일 자율주행을 위한 세계 최초의 개방형 추론 기반 비전 언어 액션(vision language action, VLA) 모델인 NVIDIA Alpamayo의 훈련과 평가에도 활용되고 있습니다. 스킬드 AI는 Blueprint를 활용해 범용 로봇 파운데이션 모델을 발전시키고 있으며, 우버는 자율주행 자동차 개발을 가속하고 있죠.
대규모 에이전트 기반 오케스트레이션
로보틱스 개발자들은 대규모 데이터 생성을 위해 필요한 복잡한 AI 인프라를 구축하고 관리할 역량을 갖추지 못한 경우가 많은데요.
오픈 소스 오케스트레이션(orchestration) 프레임워크인 NVIDIA OSMO는 이러한 워크플로우를 다양한 컴퓨팅 환경에서 통합하고 관리해 수작업을 줄이고, 개발자들이 모델 개발에 집중할 수 있도록 지원합니다.
OSMO는 이제 클로드 코드(Claude Code), 오픈AI 코덱스(OpenAI Codex), 커서(Cursor)와 같은 주요 코딩 에이전트와 연동됩니다. 이를 통해 에이전트가 자원을 선제적으로 관리하고 병목 현상을 해소하며, 대규모 환경에서 모델 제공을 가속화하는 AI 네이티브 운영을 지원합니다.
글로벌 피지컬 AI 생태계 구축
클라우드 서비스 제공업체는 가속 AI 인프라와 머신 러닝 운영, 오케스트레이션 서비스를 제공함으로써 개발자가 피지컬 AI를 대규모로 구축하고 배포하는 데 중요한 역할을 합니다.
마이크로소프트 애저는 Physical AI Data Factory Blueprint를 개방형 피지컬 AI 툴체인(toolchain)에 통합하고 있으며, 해당 툴체인은 현재 깃허브에서 이용 가능합니다. Blueprint는 애저 IoT 오퍼레이션(Azure IoT Operations), 마이크로소프트 패브릭(Fabric), 리얼타임 인텔리전스(Real-Time Intelligence), 마이크로소프트 파운드리(Foundry), 깃허브 코파일럿(Copilot) 등 애저 서비스와의 통합을 제공합니다. 이를 통해 피지컬 AI 시스템을 빠르고 대규모로 훈련, 검증할 수 있는 엔터프라이즈급 에이전트 기반 워크플로우를 지원하고 있습니다.
필드AI, 헥사곤 로보틱스, 링커 비전, 테라다인 로보틱스는 인지·모빌리티·강화학습 파이프라인 전반에서 데이터 생성·증강·평가 작업을 가속하고 대규모로 확장하도록 설계된 애저의 피지컬 AI 툴체인을 테스트하는 초기 기업들입니다.
네비우스는 자사 AI 클라우드(AI Cloud)에 OSMO를 통합했습니다. 이를 통해 개발자가 Blueprint를 활용해 요구 사항에 맞춘 프로덕션용 데이터 파이프라인을 구축할 수 있도록 지원합니다. 네비우스의 인프라는 NVIDIA RTX PRO™ 6000 Blackwell 서버 에디션 GPU와 초고속 오브젝트 스토리지, 기본 데이터 관리, 라벨링, 서버리스(serverless) 실행과 내장 관리 추론을 결합해 피지컬 AI 스택 전 과정을 포괄적으로 지원합니다.
마일스톤 시스템즈, 복셀51(Voxel51), 로보포스 등 초기 도입 기업들은 네비우스 인프라에서 Blueprint를 활용해 비디오 분석 AI 에이전트, 자율주행 자동차, 산업용 휴머노이드 로봇을 위한 모델 개발을 가속하고 있습니다.
NVIDIA Physical AI Data Factory Blueprint는 4월 중으로 깃허브에서 공개될 예정입니다.
젠슨 황 CEO의 GTC 2026 키노트 다시보기를 시청하고, 다양한 GTC 세션을 확인해 보세요.