엔비디아 옴니버스(Omniverse) 기반 차세대 로봇 개발 플랫폼 아이작 심(Isaac Sim) 프리뷰 입니다.
새롭게 업데이트된 아이작 심, 어떻게 달라졌나?
약 1년 전 엔비디아는 엔비디아 아이작 SDK와 함께 로봇 개발용으로 설계된 3D 시뮬레이션 환경인 ‘아이작 심’ 애플리케이션의 첫번째 버전을 발표했습니다. 2019년은 아이작 팀에게 정말 바쁜 해였습니다. 한 해 동안 다양한 버전의 아이작 SDK(소프트웨어개발키트)와 아이작 심이 출시됐기 때문이죠.
첫번째로 출시된 아이작 심은 언리얼 엔진 4(Unreal Engine 4) 게임 엔진을 기반으로 ‘카터(Carter)’라는 레퍼런스 로봇의 라이더 기반 네비게이션 지원을 목적으로 개발됐습니다. ‘네브심(NavSim)’이라는 아이작 심의 두번째 버전은 유니티(Unity) 엔진을 기반으로 개발됐습니다.
2월 19일 엔비디아의 심테크(SimTech) 팀은 협업 시뮬레이션 워크플로를 지원하는 엔비디아 옴니버스 플랫폼의 강력한 성능을 바탕으로 개발된 애플리케이션 겸 도구 세트인 옴니버스 키트(Omniverse Kit)에 기반한 차세대 아이작 심의 프리뷰 버전을 공개했죠. 2020.1 프리뷰 버전은 앞서 출시된 아이작 심 버전에서 사용된 카터 네비게이션 대신, 작년 12월 중국 쑤저우에서 열린 GTC 차이나에서 엔비디아의 젠슨 황 CEO가 기조연설에서 소개한 바 있는 ‘레오나르도(Leonardo)’이라는 이름의 매니퓰레이션(manipulation) 애플리케이션을 주요 기능으로 탑재했답니다.
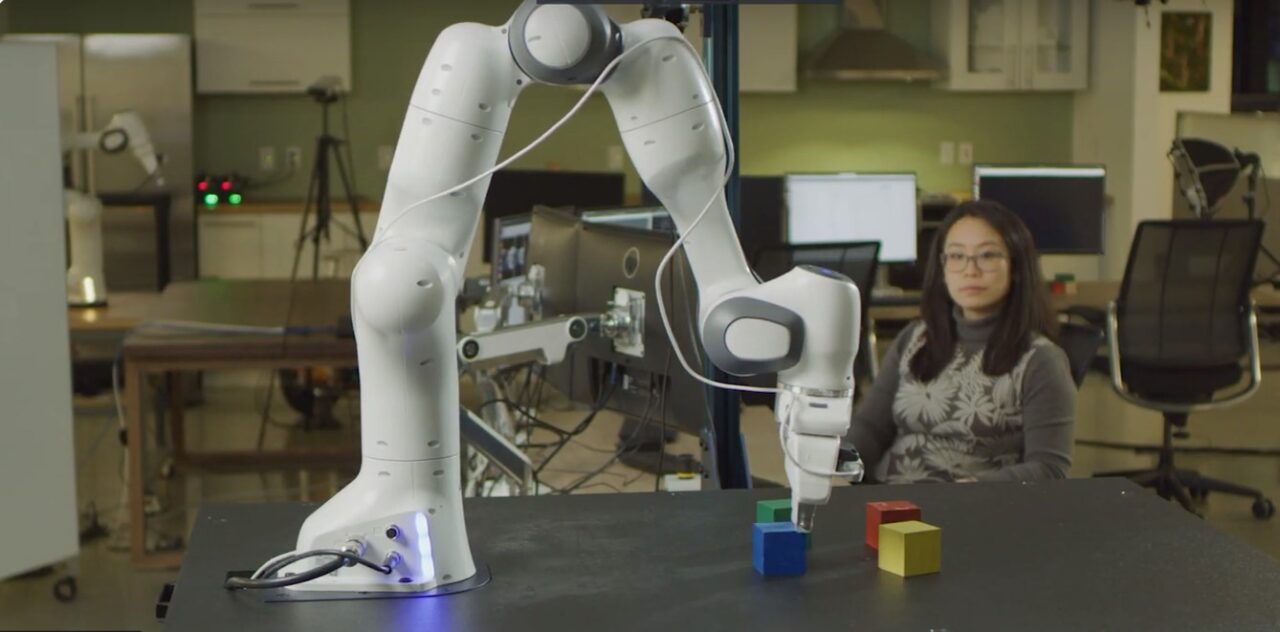
레오나르도 매니퓰레이션 프로젝트와 엔비디아의 연구원들이 어떻게 아이작 심을 활용하고 있는지에 대한 보다 자세한 내용은 엔비디아의 디터 폭스(Dieter Fox) 로봇 연구소 소장의 영상에서 확인할 수 있습니다.
위 영상에서 레오나르도 로봇이 다양한 색상의 블록들을 감지해 블록을 쌓기도 하고, 사람의 손에서 블록을 건네 받는 등 다양한 작업을 수행합니다. 레오나르도 로봇은 주로 아이작 심을 기반으로 개발된 뒤, 훈련 받고, 각종 검사를 거쳤습니다. 아이작 심이 제공하는 높은 물리적 정확성과 시각적 충실도(visual fidelity)는 ‘프랜카 에미카(Franka Emika)’라는 매니퓰레이터를 통해 구현된 물리적인 레오나르도와 그 디지털 트윈 시뮬레이션 간의 격차를 좁히는데 기여합니다.
옴니버스 키트에 새롭게 추가된 아이작 심
아이작 심 2020.1 버전은 강력한 옴니버스 키트를 기반으로 차세대 로봇 시뮬레이션을 구현합니다. 아이작 심 2020.1 버전의 주요 기능은 다음과 같습니다.
RTX 그래픽
- 최첨단 시각적 충실도와 높은 성능 구현을 목적으로 개발된 레이 트레이싱과 패스 트레이싱 렌더러
- 다수의 GPU와 노드로 확장 가능
- 물리적 기반의 MDL 재료
PHYSX 5.0
- 강력한 멀티 조인트 다이내믹을 구현하는 아티큘레이션 TGS(Temporal Gauss-Seidel) 솔버
- GPU 물리 지원
파이썬 유저 프로그래머블(PYTHON USER-PROGRAMMABLE)
- USD 기반 장면 관리로 스크립팅
- 물리학, 카메라, 객체, 메시, 재료, UI 용 API
지금 다운로드하세요!
아이작 심 2020.1 프리뷰 버전은 사용자들이 이 차세대 시뮬레이션 플랫폼의 주요 기능을 둘러볼 수 있도록 레오나르도 프로젝트의 예시를 몇 가지 제공합니다. 이번 버전은 사용자의 데스크톱에 스트림 되는 RTX를 탑재한 아마존웹서비스(AWS) 상에서 실행되는 클라우드 콘테이너 형태로 제공됩니다. 이 클라우드 기반 제품은 로컬 엔비디아 RTX GPU 없이도 모든 종류의 데스크톱 시스템에 최신 RTX 그래픽과 성능을 제공합니다.
출시 임박: 레오나르도와 카터가 만나다
올해 정식 공개될 아이작 심 2020.1에는 아이작 SDK로 구축된 매니퓰레이션과 네비게이션 애플리케이션 지원용 통합 시뮬레이션이 제공됩니다. GTC 2020을 검색해 아이작 심과 앞으로 출시될 제품에 대한 소식을 확인하세요!